
PVSR
密歇根科學 精密車輛定子約束 (PVSR) 旨在連接到任何車身,無論表面有多大或有多大彎曲。 PVSR 用於防止測量設備的靜止部分(定子)在車輪旋轉時旋轉。 PVSR 由連接到車身的柔性磁片和用於固定定子限制桿的突出支架構成。 限位桿固定在定子上 車輪脈衝傳感器 (WPT) 以及滑環組件內的 車輪力傳感器 和 車輪扭矩傳感器 組件。 PVSR 是密歇根科學公司的變體 磁性車輛定子約束 (MVSR) 現在包括一個磁盤刷插件。 它旨在將約束桿保持在支架內居中。 PVSR 在以接近零的速度測量車輪旋轉時,或在車輪旋轉可能會在正向和反向之間改變方向的測試期間是首選。
測試
了解使用 PVSR 的好處很重要。 本案例研究將用於演示 PVSR 如何幫助減少低速下車輛距離和速度測量中的誤差。 測試是使用 WPT 和四種不同的測試進行的; 走走停停、回滾、硬停和“擺動”測試。 完整的 WPT 組件通過使用 PVSR 的約束桿連接到車輛的左後輪,如下圖左側所示。 然後使用原始 MVSR 重複這些測試,內部沒有磁盤刷,如下圖右側所示。 視頻用於將圖形角運動數據與視覺結果進行比較。


成績
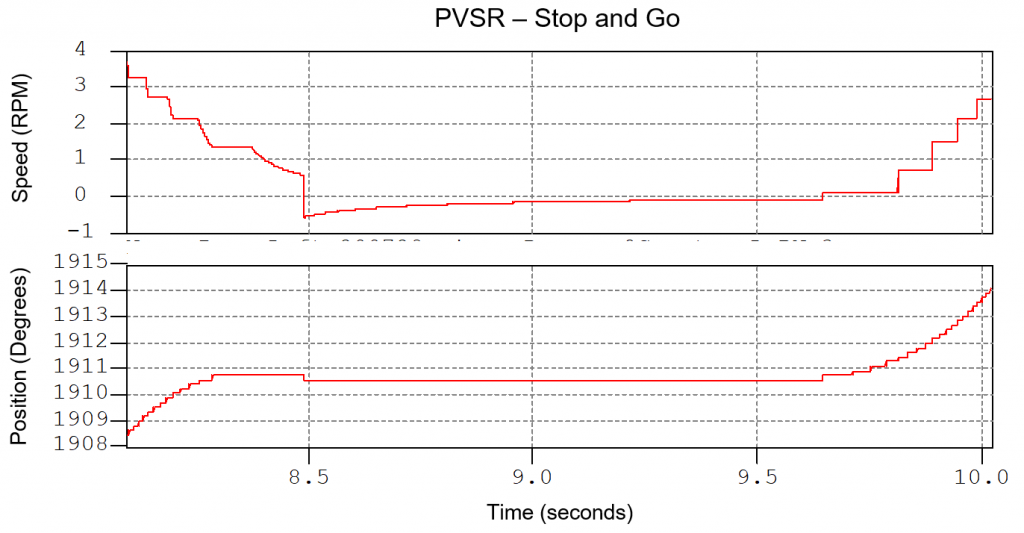
停走
該測試包括將車輛滾動到一個標記,完全停止,然後鬆開制動器並向前滾動。
PVSR
沒有 WPT 或視頻檢測到的限制桿或車輪的振動,如上面速度和位置數據中的直線所示。
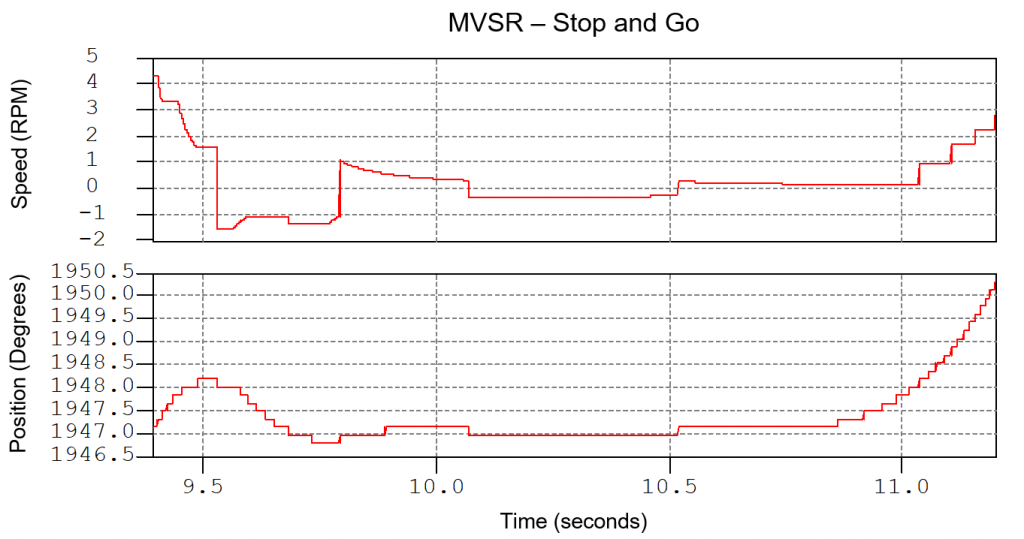
原始MVSR
停車時有輕微振盪,鬆開制動器時有反向脈衝。 這是由於原始 MVSR 中約束桿的振動造成的。
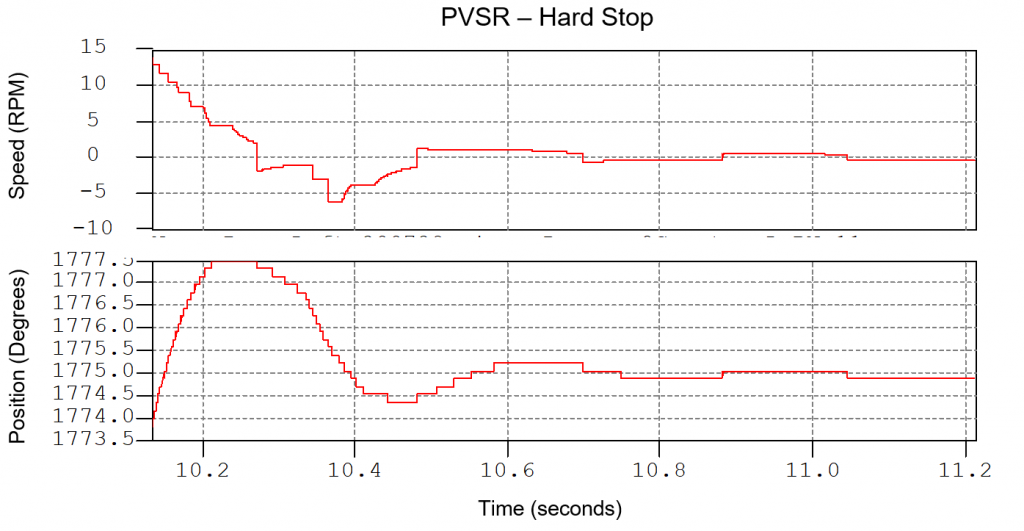
硬停止
該測試涉及加速到一個標記,然後用力製動以完全停止。
PVSR
由於車輪在停止時擺動,限制桿有輕微擺動。
原始MVSR
與 PVSR 類似,停止時有振盪。 這在數據和視頻中都可以看到。 但是,該數據顯示原始 MVSR 中的振盪比 PVSR 大得多。

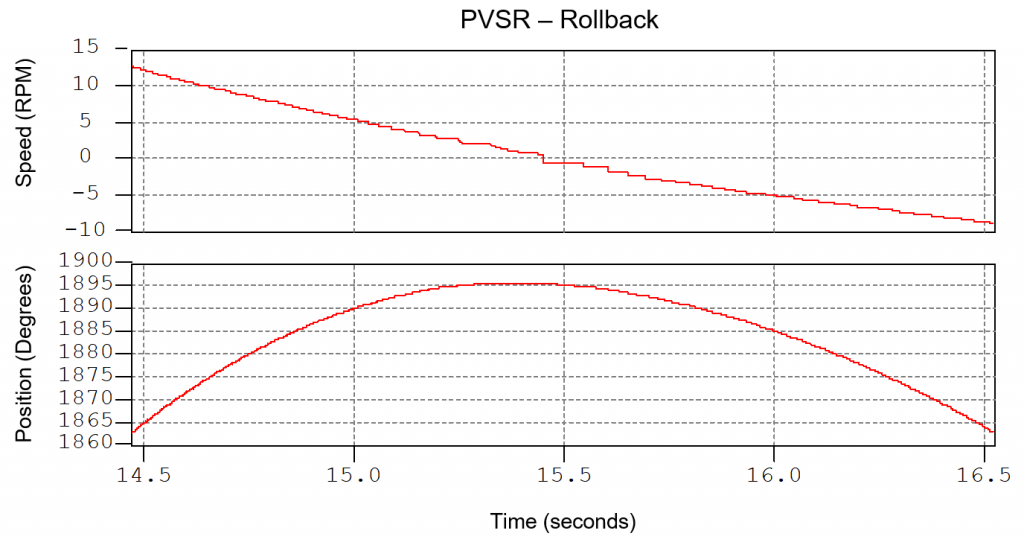
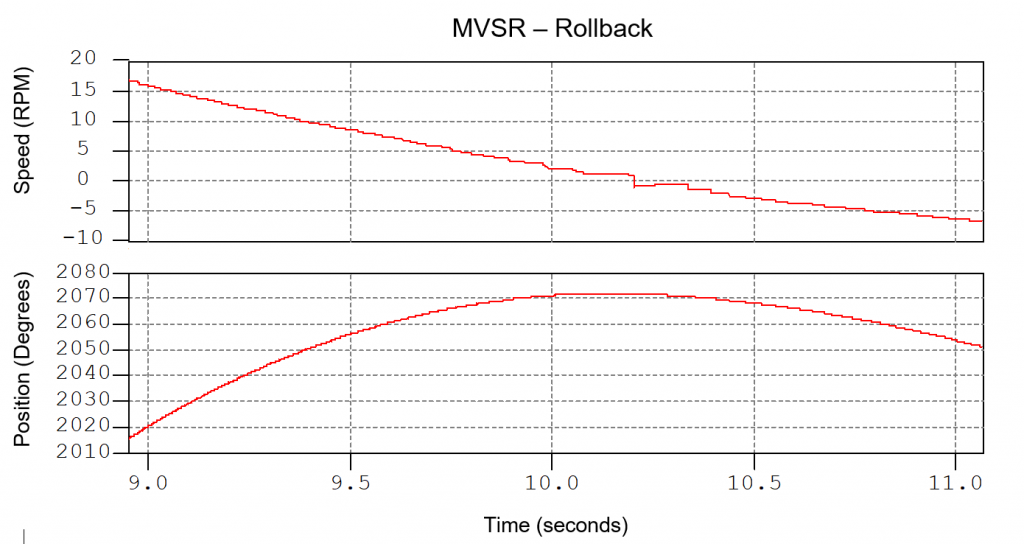
回滾
回滾測試開始時,車輛位於坡道上,稍微加速,減速至停止,然後向後滾動。
PVSR
沒有振盪,這意味著限制桿保持在 PVSR 的中心。
原始MVSR
原始 MVSR 中的約束桿沒有明顯的振盪。
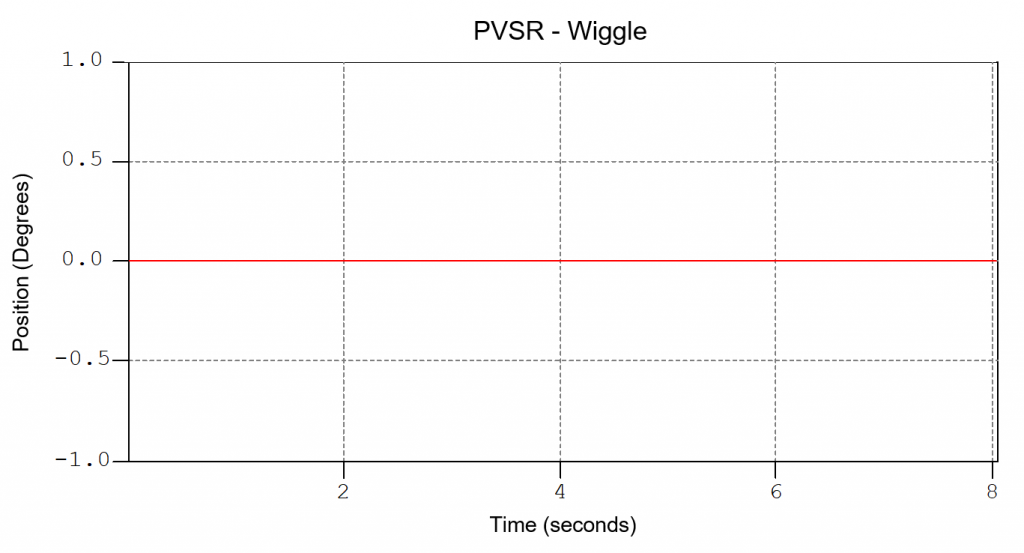
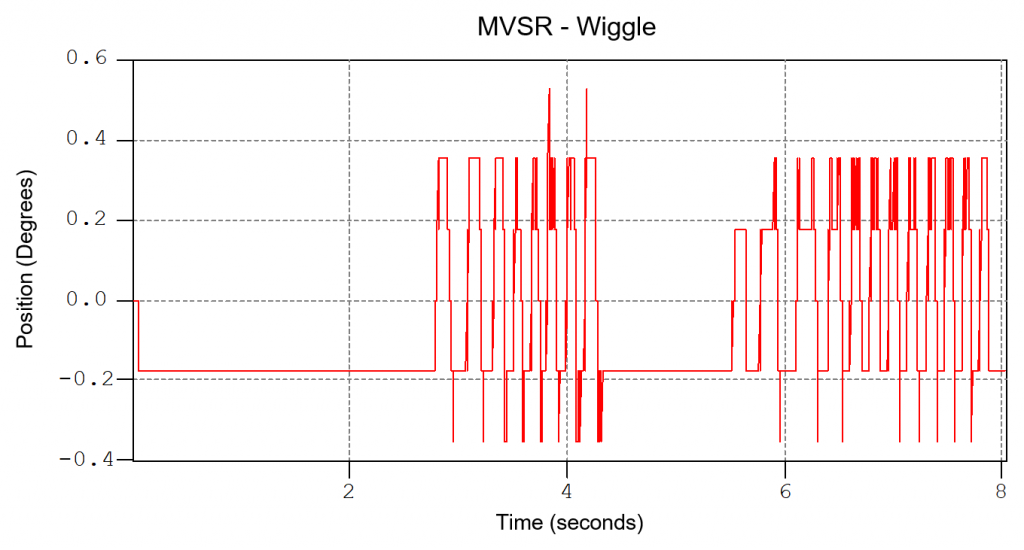
“擺動”
結果最顯著的測試也是最簡單的。 用手在 PVSR 和 MVSR 中來回移動限制桿。
PVSR
盤刷移動時無位移,無噪音。 這是意料之中的,因為磁盤刷的實施旨在糾正此類行為。
原始MVSR
由於在 MVSR 的圓形區域內沒有任何東西可以將桿固定到位,因此大量的 被引入系統。 當使用這種類型的 MVSR 時,這種噪音可能會出現在不平坦的地形上。
本案例研究展示了 PVSR 可能優於原始 MVSR 的情況。 使用可將誤差降至最低的測量設備有利於在任何環境中準確收集數據。 如果您想討論您的測試應用,請立即聯繫密歇根科學公司代表。