
密歇根科學 高分辨率輪式脈衝傳感器 (WPT) 是一種光學編碼器 連接到凸耳螺母 車輪的。 WPT 通常用於跟踪車輛的位置和速度,用於車隊管理和 自動駕駛車輛跟踪. 本案例研究將展示同時使用兩個車輪脈衝傳感器的準確性,將位置和速度測量值與 GPS 數據進行比較。
如何操作
來自編碼器的信號用於計算車輪的角位置和速度。 汽車兩側的兩個 WPT 記錄的數據可以求平均值以找到中心,從而最準確地表示汽車行駛的距離和速度。 測繪車輛通常使用 WPT 來補償 GPS 信號中斷,從而可以跟踪信號丟失期間行駛的距離。 在這項研究中,WPT 數據的高分辨率表現比所使用的 GPS 傳感器好得多,因為它具有 10,000 Hz 的高采樣率。
測試設置
為了將車輪脈衝傳感器的結果與 GPS 的結果進行比較,將兩個 WPT 系統連接到車輛上,一個在右後側,一個在左後側。 傳感器安裝在後輪上,因此不必在數據中補償前輪的轉動運動。 GPS 設備放置在車輛頂部,後輪上方的車頂中央,可以提供最準確的讀數。 左右 WPT 距離和速度被平均以匹配車輛中心的 GPS 信號。 下面顯示的一英里長的路線,連同來自 GPS 的緯度和經度圖,包括一個迴旋處和一個之字形機動。
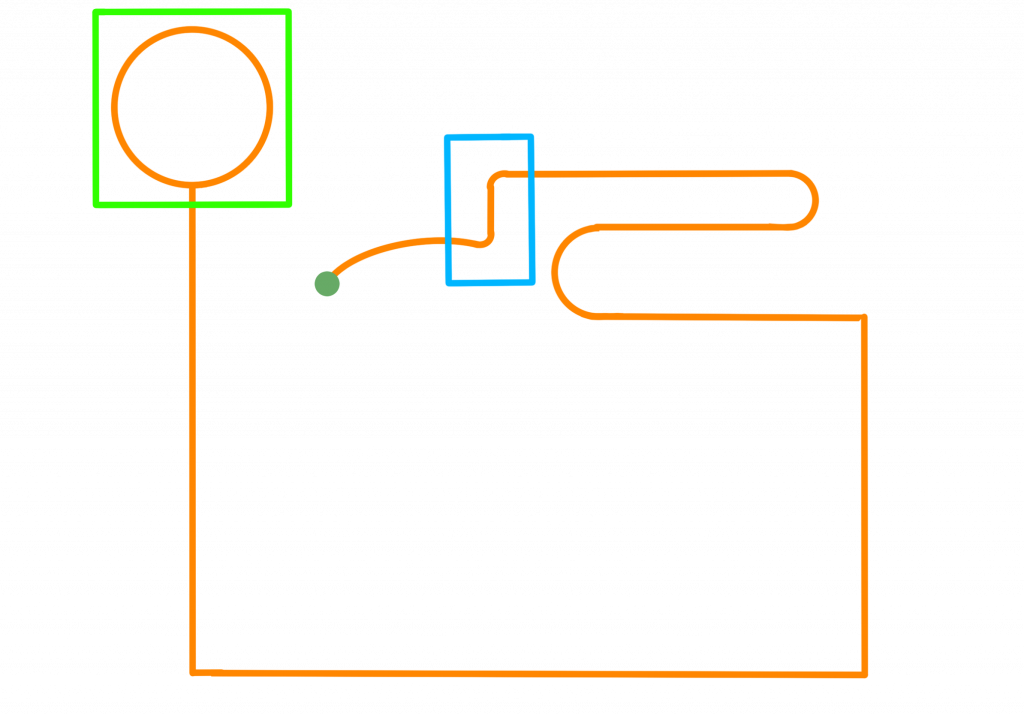
測試軌道大綱
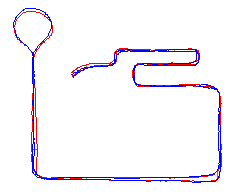
來自測試軌道的 GPS 數據
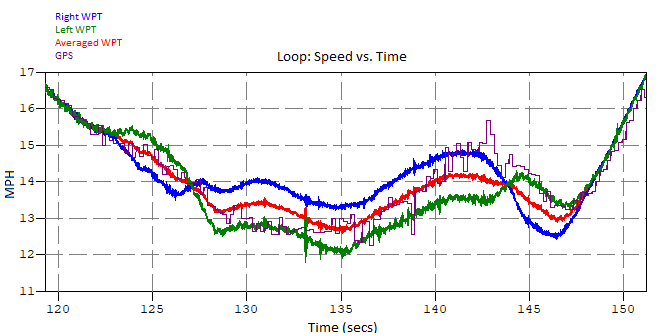
循環
當繞著測試軌道的圓形部分(如上圖綠色所示)逆時針行駛時,人們會期望右輪的速度和距離比左輪高得多。 查看如下所示的數據,發現這是真的。 右(藍色)和左(綠色)車輪速度是平均的(紅色),與 GPS 數據(紫色)幾乎完美地對齊。
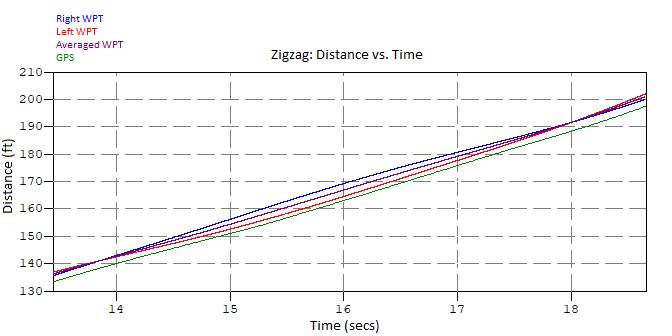
之字形路徑
包含快速右轉和左轉的區域,顯示在測試軌道輪廓上的藍色方塊內,提供了另一個有趣的視角。 對於下面的速度圖,車輛先快速左轉,然後立即右轉。 由此創建的“W”形顯示左輪(紫色)在左轉時比右輪(綠色)慢,然後在右轉時左輪比右輪快。 當雙方在整個機動過程中交換位置時,計算出的平均值(紅色)和 GPS 數據(藍色)在中間保持緊密。
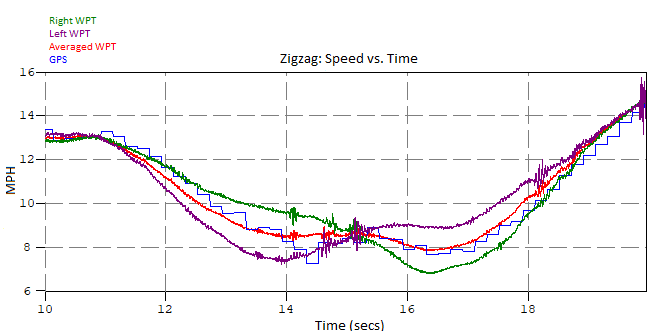
下圖中兩個交叉點之間的時間是發生左轉和右轉的地方。 右輪(藍色)在行駛距離上超過左輪(紅色),因為它在左轉期間有更大的半徑,從大約 14 秒開始到大約 15.5 秒結束。 此時,右輪比左輪行駛得更遠。 右轉在 17 秒前開始,左輪在大約 18 秒結束時趕上右輪。 行駛的平均(紫色)距離保持在兩者之間。 因為平均距離的斜率和 GPS 是一樣的,所以它們仍然記錄相同的速度和距離的變化。 然而,GPS 滯後於車輪幾英尺,因此數據略有偏移。
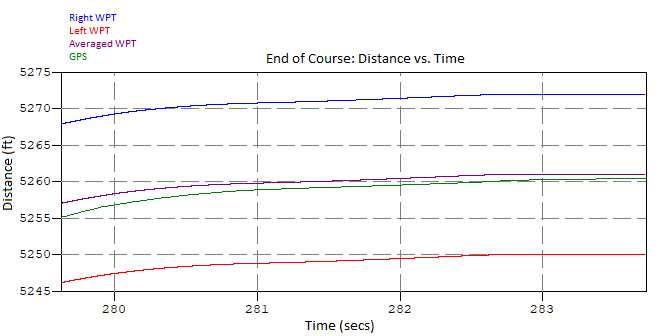
錯誤
測試的最後幾個數據點可以顯示使用兩個 WPT 而不是一個的好處。 如果僅使用一個 WPT,則記錄的距離的最大誤差為 0.22%。 然而,通過安裝兩個 WPT 並對其進行平均,誤差僅為 0.0115%,減少了 19 倍。這表明使用兩個車輪脈衝傳感器有助於減少可在多圈中累積的誤差。
該測試只是利用車輪脈衝傳感器進行的眾多不同測試之一。 擁有耐用且精確的測量系統有利於在任何環境中準確跟踪車輛的位置和速度。 如果您想討論您的車輪測試應用, 聯繫密歇根科學代表 今天。